Resonable Velocity Potato Launcher
November 2005 – April 2006
Working with Adam Collins, Chris Wolfe, and others to develop a remote controlled, pneumatic, semi-automatic potato launcher. Users many of the same concepts as UAH Rover I.
Introduction
The Potato Launcher project was conducted to further the experience gained from the UAH Rover I project with pneumatic power and a custom remote control system.
From November 2005 through April 2006, we worked to create a pneumatic, semi-automatic, remote
Team Members
- Adam Collins
- Steve Conover
- Chris Wolfe
controlled potato launcher using the UAH Rover I project as a base. As in the Rover I project, we used a Sharepoint website to collaborate and store discussions, files, useful links, and our project calendar.
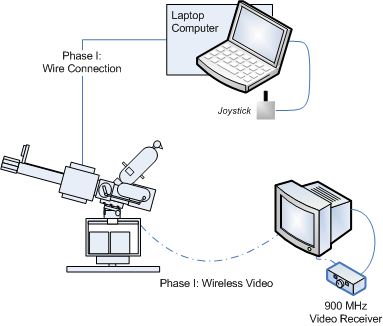
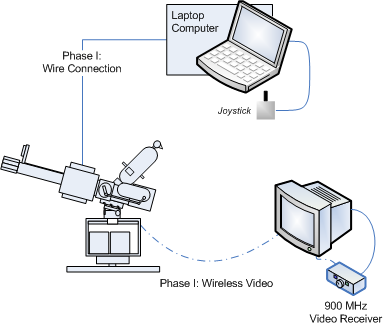
Figure 1: The final goal
Ultimately, the system would be operated remotely by a laptop. All pressure, video, positioning, and firing would be done using a custom GUI and a joystick. A video camera on the nose of the gun would be our eyes.
Launcher Evolution
Such an ambitious system is not built all at once. Since we knew nothing about potato guns when we started, we first built a prototype cannon, followed by a mobile, more practical launcher. Ultimately, a modified version of the mobile “bazooka” launcher will be build and mounted on the final platform.
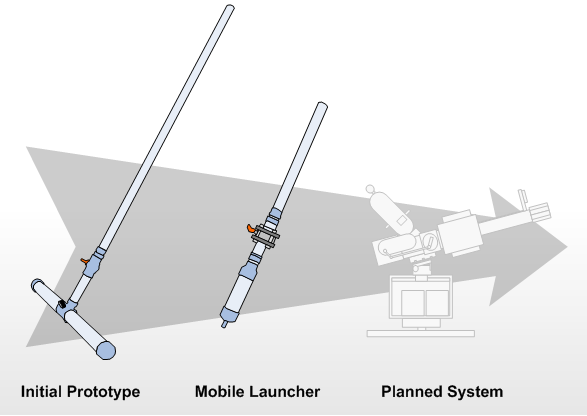
Figure 2: Launcher Evolution
Each new launcher served a purpose. The first prototype a merely an introduction. It featured a ball valve that was difficult to turn, and it was hard to transport. Nevertheless, its huge air tanks and long barrel provided a valuable size comparison and consistently fired projectiles further than any other launcher. The second launcher featured a smaller air tank, short barrel, and a new butterfly valve fir firing. The launcher was light, easy to transport, and was considered the optimal size for our final system.
The next phase would be to add automated firing mechanism to the valve so that a human does not have to turn the valve by hand. Work has already been done in this area through the investigation of a pneumatic firing piston using a secondary air tank.
Projectile Evolution
Initially we used red potatoes as projectiles for our launcher. As we progress, however, we became aware of the limitations of using potatoes for ammunition: sub-optimal shape, non-uniformity, and messy. Our resulting measurements had massive deviation and our accuracy was low. Thus, we began looking into creating a shaped projectile that would serve us better.
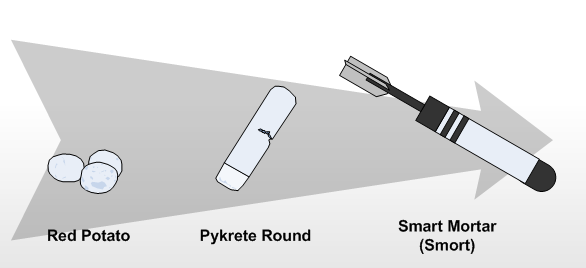
Figure 3: Projectile Evolution
At first we desired to find a biodegradable solution because we did want to recover all the shots. As a result we began experimenting with Pykrete Rounds. Test launch III was conducted to test the new rounds. The results are documented here. One of the major failures of the Pykrete round is their inability to stabilize. After much discussion, we decided to move away from the biodegradable rounds and move into an ambition “Smart Mortar” sub-project. The Smart Mortar, or Smort, was to record accelerometer and pressure readings from a flight as well as transmit video from the nose to a receiver on the ground. Smort would have a stabilizing tail section and a parachute. The first prototype was an empty shell and performed well. The second prototype, contained the video transmitter and power system, but was destroyed on launch.
Conclusion
As my April 2006 move approached, I concluded my role in this project. Adam and Chris plan to continue work, however, so we may yet see things come to completion.
Project Pages
- Working with Pykrete to create a better projectile.
- On January 28, 2006 we completed our third system test!
- All our project pictures on flickr!
- Test Page for the wireless video system.
- March 18, 2006 we failed Test Launch 5 (Yellowjacket w/ camera system)
Links
The following pages have been useful for us:
- Wikipedia: Spud gun
- Google Video: How to Build a Potato Gun
- Spudtech: Advanced Spud Gun Supplies